colcon

Universal Build Tool
Nov. 1st 2019, Dirk Thomas
ROSCon 2019, Macau, China
Building a package
-
Prerequisites:
- all external dependencies are available
- the environment is set up to make ext. dep. locatable
- Input: the sources of a package
-
Build the package using its build system
- Install the package artifacts
-
Output: artifacts ready to be used
- Setup the environment to use the installed package
README to figure out:
- what dependencies are needed
- what build system is being used and how to invoke it
- what environment variables need to be updated before / after
Building a set of packages
-
Prerequisites:
- all external dependencies are available
- the environment is set up
to make ext. dep. locatable
- Input: the sources of a set of packages
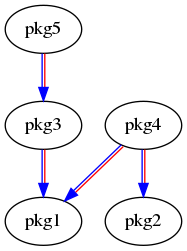
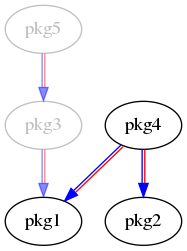
- Compute the dependency graph
- Process the packages in topological order:
for each package- Update the environment to include previous built packages which the package depends on
- Build and install the package using its build system
-
Output: artifacts ready to be used
- Setup the environment to use all installed packages
Generated by
colcon-graphviz-anim
Wait, don't we have that already?
| 1. | 2. | 3. | 4. | 5. | 6. | 7. | 8. | ||
|---|---|---|---|---|---|---|---|---|---|
| catkin_make: |  |
 |
 |
 |
 |
 |
|||
| catkin_make_isolated: | |
|
|
 |
|
|
|||
| catkin_tools: | |
 |
|
|
|||||
| ament_tools: | |
|
|
|
But...
- A pkg shouldn't need to know about the internals of other pkgs
- Should be deterministic - unrelated pkgs shouldn't affect the result
- Ability to process various package types, e.g. CMake, Python, <put-your-here>
- Native support for Linux, macOS, and Windows
- Support packages "as-is", e.g. no
package.xmlas for FastRTPS - Build as fast as possible
- Good user experience / usability features
- Extensible code base
collective construction
High level goals
- The tool should make building, testing and using multiple packages easy
- It should be possible to add support for
any kind of build system using extensions - It should be possible to build any set of packages without requiring changes to their sources - if necessary missing information can be provided externally, e.g.:
- Build Ignition packages
- Handle one-off cases, e.g. pass
-DENABLE_FOOto a single package
- After building packages they must be immediately usable
which includes setting up necessary environment variables etc.
collective construction
Out of scope - covered by other tools
- Fetch sources of the packages →
vcstool - Install dependencies of the packages →
rosdep - Create pkg-level binary packages (e.g.
.deb) →bloom,dpkg-buildpackage
collective construction
Software engineering goals
- All the functionality provided should be exposed in a way
that it can be reused by other extensions - The separation into multiple Python packages is being used to encourage modularity and loose coupling (Law of Demeter), it is also used to
demonstrate extensibility and show that certain features are not "special"
but can be contributed externally - Each component should have responsibility over a single part of the software (Single responsibility principle)
- Each functionality added should follow the principle
"you don’t pay for what you don’t use"
Setup colcon
- Install
colconincluding common extensions, via:- the Debian package
python3-colcon-common-extensionsor - the Python package
colcon-common-extensions
- the Debian package
- Using
bashorzsh? Get completion!- Install
python3-argcomplete[deb] /argcomplete[pip] - Source the completion script
colcon-argcomplete.bash|zshfrom:/usr/share/colcon_argcomplete/hook/or$HOME/.local/share/colcon_argcomplete/hook/
- Install
- Liked
roscd? Trycolcon_cd- Source the script
colcon_cd.sh(similar location)
- Source the script
- Check for updates in the future:
colcon version-check
For more details see colcon.readthedocs.io
Workspace Layout
In ROS the sources of the packages to be processes are commonly placed
- within a workspace root
<ws> - in a subdirectory named
src
<ws>
|-- src
|-- dir1
|-- package.xml [with the name tag containing "pkg1"]
|-- some_name
|-- package.xml [nested under another package not supported]
|-- dir2
|-- dir3
|-- CMakeLists.txt [with the function call "project(pkg3)"]
|-- dir4
|-- setup.py [with the setup argument "name='pkg4'"]
|-- dir5
|-- COLCON_IGNORE [empty marker file]
|-- ...
build Command
- Build all packages in the workspace:
colcon build- Minimal output showing progress on a by-package level (if everything goes smooth)
- By default if any package fails all ongoing packages are aborted, no others are started
- E.g. pass custom CMake args:
--cmake-args
which are applied to all processed packages
$ colcon build
Starting >>> pkg1
Starting >>> pkg2
Finished <<< pkg1 [10s]
Starting >>> pkg3
Finished <<< pkg3 [10s]
Starting >>> pkg5
Finished <<< pkg2 [25s]
Starting >>> pkg4
Finished <<< pkg5 [20s]
Finished <<< pkg4 [20s]
Summary: 5 packages finished [45s]
Note: if you build more than once make sure to use ccache.
Metadata
- Sometimes you want to pass pkg-specific arguments
- Via CLI that would be
cumbersomeverbose - Therefore being done via
yamlfiles- A file named
./colcon.metais picked up automatically - Otherwise pass custom files using
--metas
- A file named
- Via CLI that would be
{
"names": {
"fastrtps": {
"cmake-args": ["-DSECURITY=ON"]
}
}
}
See colcon.readthedocs.io for information about .meta files.
See colcon-metadata-repository for information how to share such files.
Event Handlers
-
By default the actual output of the build isn't shown.
- Why? Because otherwise the output from concurrent packages would interleave.
-
Instead:
-
Status line
[23s] [2/5 complete] [2 ongoing] [pkg2:install - 23s] [pkg5:cmake - 1s]
-
Any
stderroutput will be shown after a package finished-
stderroutput doesn't mean it failed -
it could fail without
stderroutput (e.g. on Windows)
-
-
But - also by default - any output it written to a
logfile
-
Status line
-
See section Event handler arguments in
colcon build --help-
Show all output after a pkg finished:
--event-handlers console_cohesion+ -
Output on-the-fly (usually only when building a single pkg):
console_direct+ -
The suffix
+enables a specific handler,-disables it
-
Show all output after a pkg finished:
<ws> |-- log |-- <cmd>_<timestamp> |-- latest_<cmd> |-- latest |-- events.log |-- logger_all.log |-- <pkg> |-- command.log |-- stderr.log |-- stdout.log |-- stdout_stderr.log |-- streams.log
list Command
<ws>
|-- src
|-- dir1
|-- package.xml
|-- some_name
|-- package.xml
|-- dir2
|-- dir3
|-- CMakeLists.txt
|-- dir4
|-- setup.py
|-- dir5
|-- COLCON_IGNORE
|-- ...
-
Discovery
Determine directories to check for a package- Default: recursively crawl for pkgs
--base-paths . - Alternatives:
- explicit (non-recursive) list of paths
--paths - get a list of paths from a configuration file
--metas
- explicit (non-recursive) list of paths
- See section Discovery arguments in
colcon list --helpfor all arguments
- Default: recursively crawl for pkgs
-
Identification
Determine if a directory contains a package
as well as its name and type, e.g.:- ROS pkg: has a
package.xmlfollowing a specific schema - CMake pkg: has a
CMakeLists.txtfile - Python pkg: has a
setup.pyfile
- ROS pkg: has a
-
Augmentation
Add metadata to identified packages- E.g.: a package named
Gazebohas ashare/gazebo/setup.shfile which should be sourced (see colcon-metadata-repository)
- E.g.: a package named
$ colcon list
pkg1 <ws>/src/dir1 (ros.ament_cmake)
pkg3 <ws>/src/dir2/dir3 (cmake)
pkg4 <ws>/src/dir2/dir4 (python)
info Command
$ colcon info ament_cmake_core path: <ws>/src/ament_cmake_core type: ros.ament_cmake name: ament_cmake_core dependencies: build: ament_package cmake python3-catkin-pkg-modules run: ament_package cmake python3-catkin-pkg-modules test: metadata: version: 0.8.0
- The
ros.prefix identifies that the package has apackage.xmlfile - Together with the
ament_cmakesuffix it determines
how the package is processed - The dependencies are (in this case) extracted from the
package.xmlfile - Some dependencies are package names in the workspace,
others name external dependencies (those are irrelevant for colcon)
graph Command
Visualize the dependencies between packages
$ colcon graph --legend
+ marks when the package in this row can be processed
* marks a direct dependency from the package indicated
by the + in the same column to the package in this row
. marks a transitive dependency
pkg1 + **.
pkg2 + *
pkg3 + *
pkg4 +
pkg5 +
- Processing the packages sequentially from top to bottom ensures the topological order
- Pkgs without dependencies between each other can be processed concurrently
- The order of
pkg4andpkg5depends on which dependencies are completed first
- The order of
colcon graph --dot | dot ...
Package Selection Arguments
Instead of processing all packages in a workspace you often
want to only process a subset to speed up your workflow.
The following options apply to various commands:
- After making changes to packages:
- Only process specific packages:
--packages-select <pkgname1> [<pkgname2> ..] - Note: when used with
buildtheir dependencies must have been build before
- Only process specific packages:
- Don't know what has changed and only want to use
pkgX?- Build up to specific pkgs - including recursive dependencies:
--packages-up-to pkgX
- Build up to specific pkgs - including recursive dependencies:
- Process all recursive downstream packages of
pkgY?- Including
pkgX:--packages-above <pkgY> - Excluding
pkgX:--packages-select-by-dep <pkgY>
- Including
- See section Package selection arguments in e.g.
colcon build --help- E.g.
--packages-select-regex <regex>,--packages-select-build-failed
- E.g.
Note: there are options to skip packages.
Skipping is different from previous seen ignoring.
The former doesn't process the package but uses it as a dependency for others.
The later is equal to the package not being in the workspace.
More Complex Package Selection
Sometimes the existing package selection arguments
aren't covering what you want to select / skip.
- Combined logic using nested invocations:
- E.g. use
--packages-up-tobut with multiple package names matching a regular expression:- Use
colcon list --packages-select-regex <regex>to determine the set of packages - Use
--packages-up-towith the result of the previous determined package names
- Use
-
colcon build --packages-up-to `colcon list --packages-select-regex <regex>`
- E.g. use
- Write your own package selection option:
- Any Python package can contribute an extension providing additional command line arguments
test / test-result Command
-
Test all packages in the workspace:
colcon test- Note: must
builda package before testing - E.g. pass custom CTest / pytest args:
--ctest-args/--pytest-args - Dealing with flaky tests:
- Identify flaky tests:
--retest-until-fail N - Get flaky tests to pass:
--retest-until-pass N
- Identify flaky tests:
- Package Selection arguments:
- After making changes to a package
buildandtestthe package itself
as well as all downstream packages:--packages-above - Retesting pkgs with test failures in previous runs:
--packages-select-test-failures
- After making changes to a package
- Failing tests by default still result in a return code of zero (meaning the tests were successfully run)
- To change that pass
--return-code-on-test-failure
- To change that pass
- Note: must
-
Get a summary of all failed tests:
colcon test-result- Show additional information about failed tests:
--verbose - Start fresh, remove previous test results:
--delete
- Show additional information about failed tests:
Pointers
colcon --help/colcon <command> --help- colcon.readthedocs.io
- For more context: ROS 2 Design Article
- How to contribute, improvements, bug fixes and documentation
- Already many contributed extensions: bazel, bundle, cargo, gradle, lcov-result, sanitizer-reports, spawn-shell, ...
- Use it with ROS 2, ROS 1, Gazebo, Ignition, ...
Questions...
