The ROS build farm
What it can do for me
(And how it does it)
Oct. 9th 2016
Dirk Thomas
ROSCon 2016, Seoul, Korea
build.ros.org
Create easy-to-
install packages
Run tests before /
after code changes
Generate API doc
and meta information
Central Service vs. Distributed
- You could
- create Debian packages yourself
- run the test using e.g. Travis CI
- generate API documentation yourself
But- setting up all these processes is quite some effort
- having someone else do it is great for the users
- the artifacts should be hosted in a central place
- if you download "official" binaries you know what you are getting
- setting up all these processes is quite some effort
Central Service But Distributed Repositories
- A ROS distribution consists of numerous packages
- various vcs types
- various hosting services
github.com/ros/rosdistro- for each ROS distribution
- target platforms
e.g. Kinetic: Ubuntu Xenial and Wily,
Debian Jessie, (Fedora 23 and 24) - packages and versions
- referencing all repositories
- target platforms
- format of
yamlfiles specified in REP 143
- for each ROS distribution
To use any of these services
you need to register your repositories
rosdistro/index.yaml
distributions:
kinetic:
distribution:
- kinetic/distribution.yaml
distribution_cache: <url .yaml.gz>
./kinetic/distribution.yaml
repositories:
catkin:
doc: <...>
release: <...>
source: <...>
release_platforms:
ubuntu:
- wily
- xenial
The High-Level View
- Get the source code:
- e.g.
git clone
- e.g.
- Install the required dependencies:
- using
rosdep
- using
- Build a package:
cmake,make,make install
- Run the tests:
make test
- Create a Debian package:
apt-src build
- Generate documentation
rosdoc_lite
Some More Details
- Need to setup the environment for building
- Install all dependencies (using binary packages)
- Since each job has different dependencies
each job needs to start with a "clean" state - Inside a Docker container
- Build the code from one repository
- Might contain more than one ROS package
- The repository is cloned into a catkin workspace
- Invoke
catkin_make_isolated
- Install the code
- To check that the install step "works"
- Build and run the tests
- Each test produces a xUnit-like result file
One container for multiple packages
Build vs. test dependencies
catkin_make vs. catkin_make_isolated
- While the Docker container contains the dependencies for all packages
- Each package is still built "in isolation":
| catkin_make | catkin_make_isolated | |
|---|---|---|
| CMake calls | 1, for the whole ws | N, each pkg separately |
| Side effects | Need to depend on other pkgs targets catkin_EXPORTED_TARGETS |
|
| Location of artifacts | Merged in a single folder E.g. one include dir |
Each pkg has its own folder |
| Side effects | Package can implicitly access e.g. the headers from other pkgs |
|
| Pros | Faster due to higher parallelization | Clean separation, better to identify problems |
The build farm builds with -j 1 for easily readable output
Create easy-to-
install packages
Run tests before /
after code changes
Generate API doc
and meta information
Devel Jobs
rosdistro/kinetic/distribution.yaml
genmsg:
source:
type: git
url: https://github.com/ros/genmsg.git
version: <valid branch name>
pkg/package.xml
<maintainer
email="dthomas@osrfoundation.org"
>Dirk Thomas</maintainer>
+ committers since the job was stable
Pull Request Jobs
rosdistro/kinetic/distribution.yaml
genmsg:
source:
test_pull_request: true
type: git
url: https://github.com/ros/genmsg.git
version: <valid branch name>
Pull Request Jobs
- Limitations
build.ros.orgonly supports GitHub at the moment- Jenkins GitHub user
ros-pull-request-builderneeds
access to the org unit
- Alternatives
- Run the same process using any other CI provider
- E.g. Travis CI, see example
.travis.ymlfile:
Create easy-to-
install packages
Run tests before /
after code changes
Generate API doc
and meta information
Doc Jobs
rosdistro/kinetic/distribution.yaml
genmsg:
doc:
type: git
url: https://github.com/ros/genmsg.git
version: <valid branch or tag name>
kinetic/api/genmsg/manifest.yaml
api_documentation: \
http://docs.ros.org/kinetic/api/genmsg/html
description: Generate ROS message and service data.
license: BSD
maintainer_status: maintained
maintainers: Dirk Thomas <email>
authors: <names>
has_changelog_rst: true
depends: <list of package dependencies>
depends_on: <list of packages depending on this>
timestamp: <last generation>
url: http://wiki.ros.org/genmsg
repo_url: https://github.com/ros/genmsg.git
bugtracker: https://github.com/ros/genmsg/issues
devel_jobs: <list of urls>
doc_job: <url>
release_jobs: <list of urls>
actions: <list of action names>
msgs: <list of msg names>
srvs: <list of service names>
Wiki Integration

wiki markup
<<PackageHeader(roscpp)>>
Create easy-to-
install packages
Run tests before /
after code changes
Generate API doc
and meta information
Release Process
gbp-repo/tracks.yaml
kinetic:
devel_branch: master
rosdistro/kinetic/distribution.yaml
foo:
release:
packages:
- bar
- baz
tags:
release: release/kinetic/{package}/{version}
url: https://github.com/ros-gbp/foo-release.git
version: 1.2.3-4
Bloom
AUTOMATION
- Makes releasing as easy as possible
- But allows customization anywhere in the process
- Creates the rosdistro pull request for you
Sourcedeb Jobs
Binarydeb Jobs
Apt Repositories
Status Pages
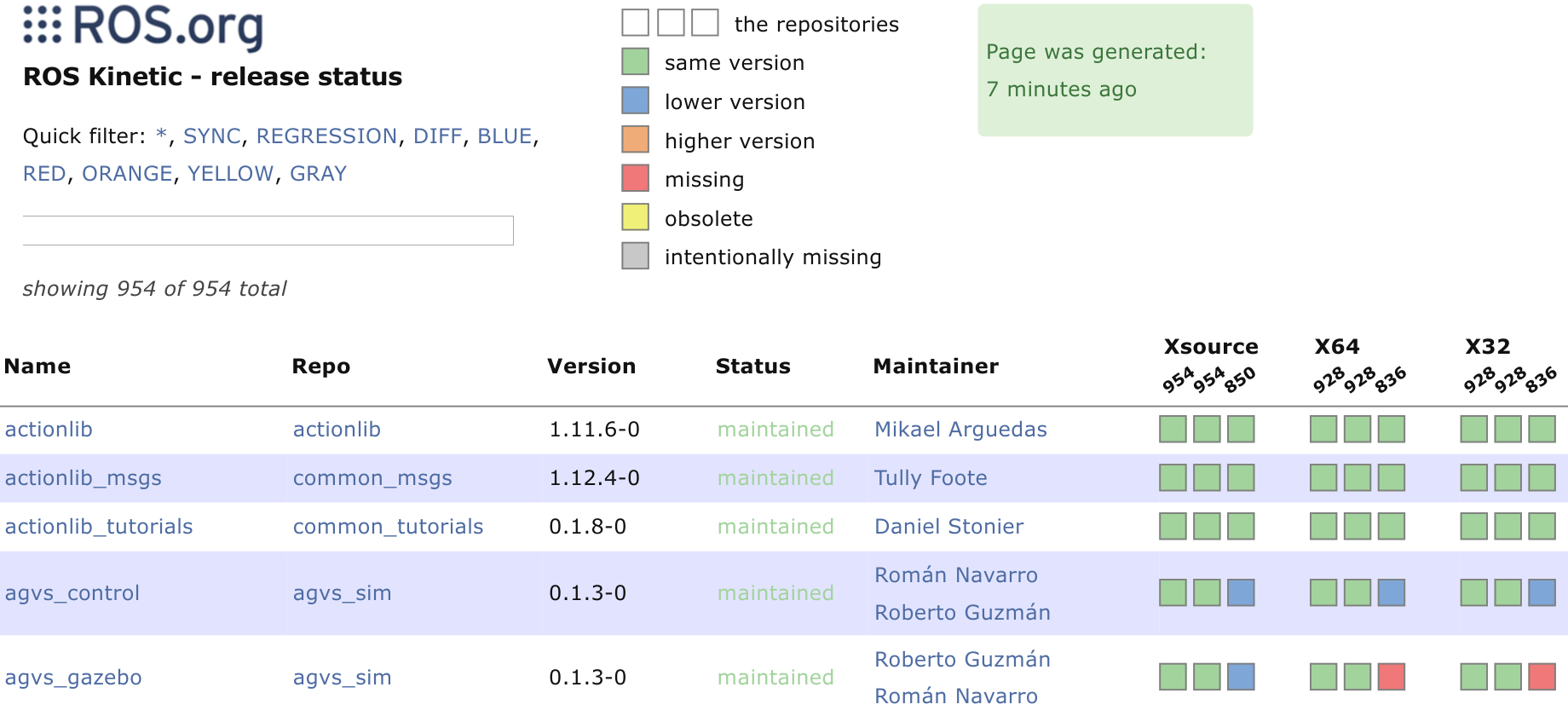 repositories.ros.org/status_page/(ros_kinetic_default.html)
repositories.ros.org/status_page/(ros_kinetic_default.html)
"Decipher" Jenkins Job Names
- Some example job names
Isrc_uS__roscpp__ubuntu_saucy__sourceJdev__ros_comm__ubuntu_trusty_amd64Kbin_uX64__rospack__ubuntu_xenial_amd64__binary- Until first
__: prefix for group of jobs 
- Until next
__: the package or repository name - Then os name, os code name, arch (except for source jobs),
source / binary (for release jobs)
Jenkins Statistics - Indigo
| count | success | unstable | failure | aborted | disabled | |
|---|---|---|---|---|---|---|
| All | 40751 | 39634 (97.25 %) | 148 (0.36 %) | 372 (0.91 %) | 129 (0.31 %) | 456 (1.11 %) |
| Manage | 91 | 91 (100.00 %) | 0 (0.00 %) | 0 (0.00 %) | 0 (0.00 %) | 0 (0.00 %) |
| Ibin_arm_uThf | 2348 | 1997 (85.05 %) | - | 16 (0.68 %) | 8 (0.34 %) | 327 (13.92 %) |
| Ibin_uS32 | 2348 | 2316 (98.63 %) | - | 22 (0.93 %) | 9 (0.38 %) | 0 (0.00 %) |
| Ibin_uS64 | 2348 | 2314 (98.55 %) | - | 22 (0.93 %) | 11 (0.46 %) | 0 (0.00 %) |
| Ibin_uT32 | 2348 | 2333 (99.36 %) | - | 12 (0.51 %) | 3 (0.12 %) | 0 (0.00 %) |
| Ibin_uT64 | 2348 | 2334 (99.40 %) | - | 11 (0.46 %) | 3 (0.12 %) | 0 (0.00 %) |
| Idev | 769 | 645 (83.87 %) | 26 (3.38 %) | 98 (12.74 %) | 0 (0.00 %) | 0 (0.00 %) |
| Idoc | 807 | 756 (93.68 %) | 31 (3.84 %) | 16 (1.98 %) | 1 (0.12 %) | 0 (0.00 %) |
| Ipr | 29 | 20 (68.96 %) | 3 (10.34 %) | 2 (6.89 %) | 0 (0.00 %) | 0 (0.00 %) |
| Isrc_uS | 2348 | 2348 (100.00 %) | - | 0 (0.00 %) | 0 (0.00 %) | 0 (0.00 %) |
| Isrc_uT | 2348 | 2348 (100.00 %) | - | 0 (0.00 %) | 0 (0.00 %) | 0 (0.00 %) |
Jenkins Statistics - Kinetic
| count | success | unstable | failure | aborted | disabled | |
|---|---|---|---|---|---|---|
| All | 40751 | 39634 (97.25 %) | 148 (0.36 %) | 372 (0.91 %) | 129 (0.31 %) | 456 (1.11 %) |
| Manage | 91 | 91 (100.00 %) | 0 (0.00 %) | 0 (0.00 %) | 0 (0.00 %) | 0 (0.00 %) |
| Kbin_dj_dJ64 | 953 | 922 (96.74 %) | - | 15 (1.57 %) | 14 (1.46 %) | 2 (0.20 %) |
| Kbin_djv8_dJv8 | 953 | 902 (94.64 %) | - | 17 (1.78 %) | 14 (1.46 %) | 20 (2.09 %) |
| Kbin_uW32 | 953 | 928 (97.37 %) | - | 14 (1.46 %) | 11 (1.15 %) | 0 (0.00 %) |
| Kbin_uW64 | 953 | 928 (97.37 %) | - | 14 (1.46 %) | 11 (1.15 %) | 0 (0.00 %) |
| Kbin_uX32 | 953 | 928 (97.37 %) | - | 14 (1.46 %) | 11 (1.15 %) | 0 (0.00 %) |
| Kbin_uX64 | 953 | 928 (97.37 %) | - | 14 (1.46 %) | 11 (1.15 %) | 0 (0.00 %) |
| Kbin_uxhf_uXhf | 953 | 905 (94.96 %) | - | 14 (1.46 %) | 11 (1.15 %) | 23 (2.41 %) |
| Kbin_uxhf_uXv8 | 953 | 907 (95.17 %) | - | 15 (1.57 %) | 11 (1.15 %) | 20 (2.09 %) |
| Kdev | 296 | 220 (74.32 %) | 49 (16.55 %) | 27 (9.12 %) | 0 (0.00 %) | 0 (0.00 %) |
| Kdoc | 310 | 294 (94.83 %) | 11 (3.54 %) | 4 (1.29 %) | 0 (0.00 %) | 0 (0.00 %) |
| Kpr | 30 | 23 (76.66 %) | 2 (6.66 %) | 2 (6.66 %) | 0 (0.00 %) | 0 (0.00 %) |
| Ksrc_dJ | 953 | 950 (99.68 %) | - | 0 (0.00 %) | 0 (0.00 %) | 8 (0.85 %) |
| Ksrc_uW | 953 | 953 (100.00 %) | - | 0 (0.00 %) | 0 (0.00 %) | 0 (0.00 %) |
| Ksrc_uX | 953 | 953 (100.00 %) | - | 0 (0.00 %) | 0 (0.00 %) | 0 (0.00 %) |
Resources for Jenkins
- Hosted at Amazon
- 1 x Jenkins master (beefy machine)
- 1 x Webserver
- 2 x Nodes (always available)
- N x Nodes (spot instances when necessary)
- → $1,000 - $2,000 per month
E.g. in September 2016- Jenkins ran ~80k builds
- Which equates to ~10k hours of work
Run "Jobs" Locally
- The build farm is powered by the Python package ros_buildfarm
- After installing it:
- Debian package
python-ros-buildfarm - PyPI
ros_buildfarm
- Debian package
- You can run:
- generate_devel_script.py <many args>
- generate_doc_script.py <many args>
- generate_release_script.py <many args>
- to easily reproduce results of the build farm
- run "jobs" for any target platform (within Docker) locally
Test Across Multiple Repos
- ① You make related changes in different repos, e.g.
- repo A: add a new API
- repo B: use the new API
- → The devel / PR jobs won't work for this case ☹
- repo A: passes but doesn't really check the new API
- repo B:
failsbecause it's using the last released version of A
② You want to check if your changes break any downstream packages- repo A: make some changes
- repo B: check that the tests for the last released version still pass
- → The devel / PR jobs don't cover for this case either ☹
Prerelease "Job"
prerelease.ros.org
Devel job with multiple repos
Supported Targets
- The build farm can produce binary packages for
- Ubuntu, Debian
- amd64, i386, arm64, armhf
We can't cover all combinations ( and ), for Kinetic we cover- Ubuntu: Xenial & Wily amd64 & i386, Xenial arm64 & armhf
- Debian: Jessie amd64 & arm64
Bloom also generates meta information forrpm(Fedora)- But we don't build binary packages (yet?)
If you want to create binaries for a not supported target- Talk to us (<hint> donations as well as time to support efforts helps 😉)
- Contribute code to automate building binaries for new targets
- or [see next slide]
Your Own Build Farm
- Use cases
- Build a different OS name / OS code name / architecture combination
- Process private repositories
- You will need your own rosdistro database
- Try modified version of the build farm
Two step process [wiki.ros.org/buildfarm]- Provision machines:
- Jenkins master, Apache webserver, Build nodes
- Generate the Jenkins jobs
- Provision machines:
Last years presentation from Bosch: [pdf]
Expect continuous effort

![]()
What Can You Do
- Register your repositories
- add
docentry to generate documentation- create a wiki page for your packages
- add
sourceentry for devel jobs and easy cloning for users- if the devel job fails, don't remove the entry, only disable the job:
test_commits: false - e.g. your repo depends on other packages which are not released
- if the devel job fails, don't remove the entry, only disable the job:
- consider enabling
pull request testing releaseyour packages, also into newer ROS distros
- add
Watch out for notification emails from Jenkins- read it, search for the problem, try to fix it, ask for help
- as a last resort: disable the job, blacklist target, remove the release
Troubleshooting
- "It works locally but the job fails" → something must be different
- Have you tried using `catkin_make_isolated`?
- Most commonly you have a dependency installed but the build farm doesn't. Check the declared dependencies.
CMake Error at /opt/ros/kinetic/share/catkin/cmake/catkinConfig.cmake:83 (find_package): Could not find a package configuration file provided by "<pkg_name>"
- "The devel job passed but the release failed"
- In a devel job all packages share the same container. One package might declare a dependency another package uses without declaring it itself.
- Expect (very rarely) all kinds of "hiccups"
- apt update failing since the repository is being modified concurrently
- network problems, GitHub resetting the connection, an http request not being handled, ...
- If your problem persists it's probably not such a hiccup
Questions...

For more information go to:
github.com/ros-infrastructure/ros_buildfarm